При использовании электродвигателя в инструментах, одной из серьёзных проблем является регулировка скорости их вращения. Если скорость недостаточно высока, то действие инструмента является недостаточно эффективным.
Если же она излишне высока, то это приводит не только к существенному перерасходу электрической энергии, но и к возможному пережогу инструмента. При слишком высокой скорости вращения, работа инструмента может стать также менее предсказуемой. Как это исправить? Для этой цели принято использовать специальный регулятор скорости вращения.
Двигатель для электроинструментов и бытовой техники обычно относится к одному из 2 основных типов:
- Коллекторные двигатели.
- Асинхронные двигатели.
В прошлом, вторая из указанных категорий имела наибольшее распространение. Сейчас, примерно 85% двигателей, которые употребляются в электрических инструментах, бытовой или кухонной технике, относятся к коллекторному типу. Объясняется это тем, что они имеют большую степень компактности, они мощнее и процесс управления ими является более простым.
Действие любого электродвигателя построено на очень простом принципе: если между полюсами магнита поместить прямоугольную рамку, которая может вращаться вокруг своей оси, и пустить по ней постоянный ток, то рамка станет поворачиваться. Направление вращения определяется согласно «правилу правой руки».
Эту закономерность можно использовать для работы коллекторного двигателя.
Важным моментом здесь является подключение тока к этой рамке. Поскольку она вращается, для этого используются специальные скользящие контакты. После того, как рамка повернётся на 180 градусов, ток по этим контактам потечёт в обратном направлении. Таким образом, направление вращения останется прежним. При этом, плавного вращения не получится. Для достижения такого эффекта принято использовать несколько десятков рамок.
Устройство

Коллекторный двигатель состоит обычно из ротора (якоря), статора, щёток и тахогенератора:
- Ротор - это вращающаяся часть, статор - это внешний магнит.
- Щётки, сделанные из графита – это основная часть скользящих контактов, через которую на вращающийся якорь подаётся напряжение.
- Тахогенератор – это прибор, который отслеживает характеристики вращения. В случае нарушения равномерности движения, он корректирует поступающее в двигатель напряжение, тем самым делая его более плавным.
- Статор может содержать не один магнит, а, например, 2 (2 пары полюсов). Также, вместо статических магнитов, здесь могут быть использованы и катушки электромагнитов. Работать такой мотор может как от постоянного, так и от переменного тока.
Простота регулировки скорости коллекторного двигателя определяется тем, что скорость вращения прямо зависит от величины поданного напряжения.
Кроме этого, важной особенностью является то, что ось вращения непосредственно можно присоединять к вращающемуся инструменты без использования промежуточных механизмов.
Если говорить об их классификации, то можно говорить о:
- Коллекторных двигателях постоянного тока.
- Коллекторных двигателях переменного тока.
В этом случае, речь идёт о том, каким именно током происходит питание электродвигателей.
Классификация может быть сделана также и по принципу возбуждения двигателя. В устройстве коллекторного двигателя, электрическое питание подаётся и на ротор и на статор двигателя (если в нём используются электромагниты).
Разница состоит в том, как организованы эти подключения.
Тут принято различать:
- Параллельное возбуждение.
- Последовательное возбуждение.
- Параллельно-последовательное возбуждение.
Регулировка
 Теперь расскажем о том, как можно регулировать обороты коллекторных двигателей. В связи с тем, что скорость вращения мотора просто зависит от величины подаваемого напряжения, то любые средства регулировки, которые способны выполнять эту функцию для этого вполне пригодны.
Теперь расскажем о том, как можно регулировать обороты коллекторных двигателей. В связи с тем, что скорость вращения мотора просто зависит от величины подаваемого напряжения, то любые средства регулировки, которые способны выполнять эту функцию для этого вполне пригодны.
Перечислим несколько такого рода вариантов для примера:
- Лабораторный автотрансформатор (ЛАТР).
- Заводские платы регулировки , используемые в бытовых приборах (можно использовать в частности те, которые применяются в миксерах или в пылесосах).
- Кнопки , используемые в конструкции электроинструментах.
- Бытовые регуляторы освещения с плавным действием.
Однако, все вышеперечисленные способы имеют очень важный изъян. Вместе с уменьшением оборотов, одновременно уменьшается и мощность работы мотора. В некоторых случаях, его можно остановить даже просто рукой. В некоторых случаях, это может быть приемлемо, но большей частью, это является серьёзным препятствием.
Хорошим вариантом является выполнение регулировки оборотов посредством использования тахогенератора. Его обычно устанавливают на заводе. При отклонениях в скорости вращения мотора, через в мотор передаётся уже откорректированное электропитание, соответствующее требуемой скорости вращения. Если в эту схему встроить регулировку вращения мотора, то потери мощности здесь происходить не будет.
Как это выглядит конструктивно? Наиболее распространены реостатная регулировка вращения, и сделанная на основе использования полупроводников.
В первом случае, речь идёт о переменном сопротивлении с механической регулировкой. Она последовательно подключается к коллекторному электродвигателю. Недостатком является дополнительное выделение тепла и дополнительная трата ресурса аккумулятора. При таком способе регулировк, происходит потеря мощности вращения мотора. Является дешёвым решением. Не применяется для достаточно мощных моторов по упомянутым причинам.
Во втором случае, при использовании полупроводников, происходит управление мотором путём подачи определённых импульсов. Схема может менять длительность таких импульсов, что в свою очередь, меняет скорость вращения без потери мощности.
Как изготовить своими руками?
Существуют различные варианты схем регулировки. Приведём один из них более подробно.
Вот схема его работы:

Первоначально, это устройство было разработана для регулировки коллекторного двигателя на электротранспорте. Речь шла о таком, где напряжение питания составляет 24 В, но эта конструкция применима и для других двигателей.
Слабым местом схемы, которое было определено при испытаниях её работы, является плохая пригодность при очень больших значениях силы тока. Это связано с некоторым замедлением работы транзисторных элементов схемы.
Рекомендуется, чтобы ток составлял не более 70 А. В этой схеме нет защиты по току и по температуре, поэтому рекомендуется встроить амперметр и контролировать силу тока визуально. Частота коммутации составит 5 кГц, она определяется конденсатором C2 ёмкостью 20 нф.
При изменении силы тока, эта частота может изменяться между 3 кГц и 5 кГц. Переменный резистор R2 служит для регулировки тока. При использовании электродвигателя в бытовых условиях, рекомендуется использовать регулятор стандартного типа.
При этом, рекомендуется подобрать величину R1 таким образом, чтобы правильно настроить работу регулятора. С выхода микросхемы, управляющий импульс поступает на двухтактный усилитель на транзисторах КТ815 и КТ816, далее идёт уже на транзисторы.
Печатная плата имеет размер 50 на 50 мм и изготавливается из одностороннего стеклотекстолита:

На этой схеме дополнительно указаны 2 резистора по 45 ом. Это сделано для возможного подключения обычного компьютерного вентилятора для охлаждения прибора. При использовании в качестве нагрузки электродвигателя, необходимо схему заблокировать блокирующим (демпферным) диодом, который по своим характеристикам соответствует удвоенному значению тока нагрузки и удвоенному значению питающего напряжения.
Работа устройства при отсутствии такого диода может привести к поломке вследствие возможного перегрева. При этом, диод нужно будет поместить на теплоотвод. Для этого, можно воспользоваться металлической пластиной, которая имеет площадь 30 см2.
Регулирующие ключи работают так, что потери мощности на них достаточно малы. В оригинальной схеме, был использован стандартный компьютерный вентилятор. Для его подключения использовалось ограничительное сопротивление 100 Ом и напряжение питания 24 В.
Собранное устройство выглядит следующим образом:


При изготовлении силового блока (на нижнем рисунке), провода должны быть присоединены таким образом, чтобы было минимум изгибов тех проводников по которым проходят большие токи.Мы видим, что изготовление такого прибора требует определённых профессиональных знаний и навыков. Возможно, в некоторых случаях имеет смысл воспользоваться покупным устройством.
Критерии выбора и соимость
Для того, чтобы правильно выбрать наиболее подходящий тип регулятора, нужно хорошо представлять себе, какие есть разновидности таких устройств:
- Различные типы управления. Может быть векторная или скалярная система управления. Первые применяются чаще, а вторые считаются более надёжными.
- Мощность регулятора должна соответствовать максимально возможной мощности мотора.
- По напряжению удобно выбирать устройство, имеющее наиболее универсальные свойства.
- Характеристики по частоте. Регулятор, который вам подходит, должен соответствовать наиболее высокой частоте, которую использует мотор.
- Другие характеристики. Здесь речь идёт о величине гарантийного срока, размерах и других характеристиках.
В зависимости от назначения и потребительских свойств, цены на регуляторы могут существенно различаться.
Большей частью они находятся в диапазоне примерно от 3,5 тысяч рублей до 9 тысяч:
- Регулятор оборотов KA-18 ESC , предназначенный для моделей масштаба 1:10. Стоит 6890 рублей.
- Регулятор оборотов MEGA коллекторный (влагозащищенный). Стоит 3605 рублей.
- Регулятор оборотов для моделей LaTrax 1:18. Его цена 5690 рублей.
Наиболее простой метод регулирования скорости вращения двигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM). Суть этого метода заключается в том, что напряжение питания подается на двигатель в виде импульсов. При этом частота следования импульсов остается постоянной, а их длительность может меняться.
ШИМ сигнал характеризуется таким параметром как коэффициент заполнения или Duty cycle. Это величина обратная скважности и равна отношению длительности импульса к его периоду.
D = (t/T) * 100%
На рисунках ниже изображены ШИМ сигналы с различными коэффициентами заполнения.
При таком методе управления скорость вращения двигателя будет пропорциональна коэффициенту заполнения ШИМ сигнала.
Простая схема управления двигателем постоянного тока
Простейшая схема управления двигателем постоянного тока состоит из полевого транзистора, на затвор которого подается ШИМ сигнал. Транзистор в данной схеме выполняет роль электронного ключа, коммутирующего один из выводов двигателя на землю. Транзистор открывается на момент длительности импульса.

Как будет вести себя двигатель в таком включении? Если частота ШИМ сигнала будет низкой (единицы Гц), то двигатель будет поворачиваться рывками. Это будет особенно заметно при маленьком коэффициенте заполнения ШИМ сигнала.
При частоте в сотни Гц мотор будет вращаться непрерывно и его скорость вращения будет изменяться пропорционально коэффициенту заполнения. Грубо говоря, двигатель будет "воспринимать" среднее значение подводимой к нему энергии.
Схема для генерации ШИМ сигнала
Существует много схем для генерации ШИМ сигнала. Одна из самых простых - это схема на основе 555-го таймера. Она требует минимум компонентов, не нуждается в настройке и собирается за один час.
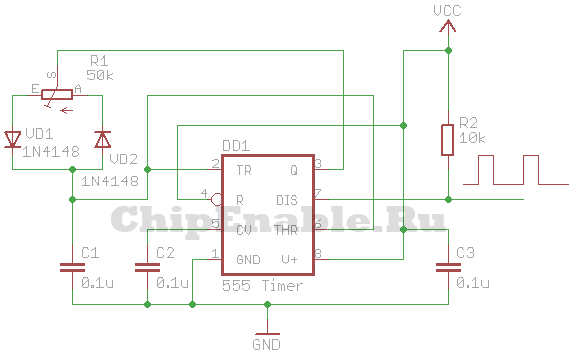
Напряжение питания схемы VCC может быть в диапазоне 5 - 16 Вольт. В качестве диодов VD1 - VD3 можно взять практически любые диоды.
Если интересно разобраться, как работает эта схема, нужно обратиться к блок схеме 555-го таймера. Таймер состоит из делителя напряжения, двух компараторов, триггера, ключа с открытым коллектором и выходного буфера.

Вывод питания (VCC) и сброса (Reset) у нас заведены на плюс питания, допустим, +5 В, а земляной (GND) на минус. Открытый коллектор транзистора (вывод DISCH) подтянут к плюсу питания через резистор и с него снимается ШИМ сигнал. Вывод CONT не используется, к нему подключен конденсатор. Выводы компараторов THRES и TRIG объединены и подключены к RC цепочке, состоящей из переменного резистора, двух диодов и конденсатора. Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую.
В момент включения питания на выводе OUT низкий логический уровень, тогда на выводах THRES и TRIG, благодаря диоду VD2, тоже будет низкий уровень. Верхний компаратор переключит выход в ноль, а нижний в единицу. На выходе триггера установится нулевой уровень (потому что у него инвертор на выходе), транзисторный ключ закроется, а на выводе OUT установиться высокий уровень (потому что у него на инвертор на входе). Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться.
Приблизительную частоту ШИМ сигнала, формируемого этой схемой, можно рассчитать по следующей формуле:
F = 1.44/(R1*C1), [Гц]
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 288 Гц.
ШИМ регулятор оборотов двигателя постоянного тока
Объединим две представленные выше схемы, и мы получим простую схему регулятора оборотов двигателя постоянного тока, которую можно применить для управления оборотами двигателя игрушки, робота, микродрели и т.д.
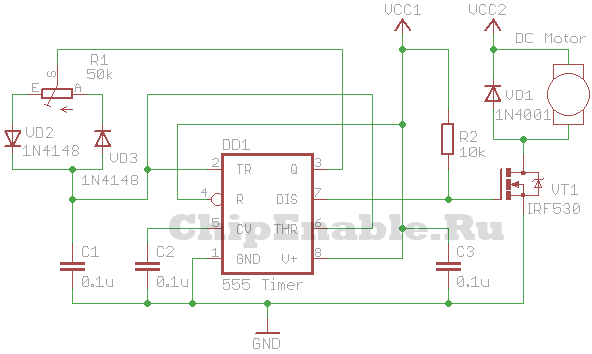
VT1 - полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1.
Вместо полевого транзистора можно использовать биполярный n-p-n транзистор, транзистор дарлингтона, оптореле соответствующей мощности.
Качественный и надёжный контроллер скорости вращения для однофазных коллекторных электродвигателей можно сделать на распространённых деталях буквально за 1 вечер. Эта схема имеет встроенный модуль обнаружения перегрузки, обеспечивает мягкий пуск управляемого двигателя и стабилизатор скорости вращения мотора. Работает такой блок с напряжением как 220, так и 110 вольт.
Технические параметры регулятора
- напряжение питания: 230 вольт переменного тока
- диапазон регулирования: 5…99%
- напряжение нагрузки: 230 В / 12 А (2,5 кВт с радиатором)
- максимальная мощность без радиатора 300 Вт
- низкий уровень шума
- стабилизация оборотов
- мягкий старт
- размеры платы: 50×60 мм
Принципиальная электросхема
 Схема регулятор мотора на симисторе и U2008
Схема регулятор мотора на симисторе и U2008
Схема модуля системы регулирования основана на генераторе ШИМ импульсов и симисторе управления мотором — классическая схемотехника для подобных устройств. Элементы D1 и R1 обеспечивают ограничение величины напряжения питания до значения безопасной для питания микросхемы генератора. Конденсатор C1 отвечает за фильтрацию напряжения питания. Элементы R3, R5 и P1 являются делителем напряжения с возможностью его регулирования, который используется для задания величины мощности, подаваемой в нагрузку. Благодаря применению резистора R2, непосредственно входящего в цепь поступления на м/с фазы, внутренние блоки синхронизированы с симистором ВТ139.
 Печатная плата
Печатная плата
На следующем рисунке показано расположение элементов на печатной плате. Во время монтажа и запуска следует обратить внимание на обеспечение условий безопасной работы — регулятор имеет питание от сети 220В и его элементы непосредственно подключены к фазе.
Увеличение мощности регулятора
В испытательном варианте был применен симистор BT138/800 с максимальным током 12 А, что дает возможность управления нагрузкой более 2 кВт. Если необходимо управление ещё большими токами нагрузки — советуем тиристор установить за пределами платы на большом радиаторе. Также следует помнить о правильном выборе предохранителя FUSE в зависимости от нагрузки.

Кроме управления оборотами электромоторов, можно без каких-либо переделок использовать схему для регулировки яркости ламп.
Для регулировки частоты вращения маломощных электродвигателей коллекторного типа обычно применяют резистор, который включают последовательно с двигателем. Но такой способ включения обеспечивает очень низкий КПД, а самое главное не позволяет осуществлять плавную регулировку оборотов (найти переменный резистор достаточной мощности на несколько десятков Ом совсем не просто). А самый главный недостаток такого способа, это то, что иногда происходит остановка ротора при снижении напряжения питания.
ШИМ-регуляторы , речь о которых пойдет в этой статье, позволяют осуществлять плавную регулировку оборотов без перечисленных выше недостатков. Помимо этого ШИМ-регуляторы так же можно применять и для регулировки яркости ламп накаливания.
На рис.1 приведена схема одного из таких ШИМ-регуляторов . Полевой транзистор VT1 является генератором пилообразного напряжения (с частотой повторения 150 Гц), а операционный усилитель на микросхеме DA1 работает как компаратор, формирующий ШИМ-сигнал на базе транзистора VT2. Частота вращения регулируется переменным резистором R5, изменяющим ширину импульсов. Благодаря тому, что их амплитуда равна напряжению питания, электродвигатель не будет «тормозить», а кроме этого можно добиться более медленного вращения, чем в обычном режиме.
![]()
Схема ШИМ регуляторов на рис.2 аналогична предыдущей, но задающий генератор здесь выполнен на операционном усилителе (ОУ) DA1. Этот ОУ функционирует в роли генератора импульсов напряжения треугольной формы с частотой повторения 500 Гц. Переменный резистор R7 позволяет осуществлять плавную регулировку вращения.
![]()
На рис.3. представлена весьма интересная схема регулятора. Этот ШИМ регулятор выполнен на интегральном таймере NE555 . Задающий генератор имеет частоту повторения 500 Гц. Длительность импульсов, а, следовательно, и частоту вращения ротора электродвигателя можно регулировать в диапазоне от 2 до 98 % периода повторения. Выход генератора ШИМ регулятора на таймере NE555 подключен к усилителю тока, выполненному на транзисторе VT1 и собственно управляет электродвигателем М1.
Главным недостатком схем рассмотренных выше является отсутствие элементов стабилизации частоты вращения вала при изменении нагрузки. А вот следующая схема, показанная на рис.4., поможет решить эту проблему.
![]()
Данный ШИМ регулятор как и большинство аналогичных устройств, имеет задающий генератор импульсов напряжения треугольной формы (частота повторения 2 кГц), выполненный на DA1.1.DA1.2, компаратор на DA1.3, электронный ключ на транзисторе VT1, а также регулятор скважности импульсов, а по сути частоты вращения электродвигателя - R6. Особенностью схемы является наличие положительной обратной связи посредством резисторов R12, R11, диода VD1,конденсатора C2, и DA1.4, которая обеспечивает постоянную частоты вращения вала электродвигателя при изменении нагрузки. При подключении ШИМ регулятора к конкретному электродвигателю при помощи резистора R12 производится регулировка глубины ПОС, при которой не возникает автоколебаний частоты вращения при увеличении или уменьшении нагрузки на вал двигателя.
Элементная база. В приведенных в статье схемах можно использовать следующие аналоги деталей: транзистор КТ117А можно заменить на КТ117Б-Г или как вариант на 2N2646; КТ817Б - КТ815, КТ805; микросхему К140УД7 на К140УД6, или КР544УД1, ТL071, TL081; таймер NE555 на С555, или КР1006ВИ1; микросхему TL074 на TL064, или TL084, LM324. Если необходимо подключить к ШИМ-регулятору более мощную нагрузку ключевой транзистор КТ817 необходимо заменить более мощным полевым транзистором, как вариант, IRF3905 или подобным. Указанный транзистор способен пропускать токи до 50А.
При работе с множеством различных технологий часто стоит вопрос: как управлять мощностью, которая доступна? Что делать, если её необходимо понизить или повысить? Ответом на эти вопросы служит ШИМ-регулятор. Что он собой представляет? Где применяется? И как самому собрать такой прибор?
Что такое широтно-импульсная модуляция?
Без выяснения значения этого термина продолжать не имеет смысла. Итак, широтно-импульсная модуляция — это процесс управления мощностью, которая подводится к нагрузке, осуществляемая путём видоизменения скважности импульсов, которая делается при постоянной частоте. Существует несколько типов широтно-импульсной модуляции:
1. Аналоговый.
2. Цифровой.
3. Двоичный (двухуровневый).
4. Троичный (трехуровневый).
Что такое ШИМ-регулятор?

Теперь, когда мы знаем, что такое широтно-импульсная модуляция, можно поговорить и о главной теме статьи. Используется ШИМ-регулятор для того, чтобы регулировать напряжение питания и для недопущения мощных инерционных нагрузок в авто- и мототехнике. Это может звучать слишком сложно и лучше всего пояснить на примере. Допустим, необходимо сделать, чтобы лампы освещения салона меняли свою яркость не сразу, а постепенно. Это же относится к габаритным огням, автомобильным фарам или вентиляторам. Воплотить такое желание можно путём установки транзисторного регулятора напряжения (параметрический или компенсационный). Но при большом токе на нём будет выделяться чрезвычайно большая мощность и потребуется установка дополнительных больших радиаторов или дополнение в виде системы принудительного охлаждения с использованием маленького вентилятора, снятого с компьютерного устройства. Как видите, данный путь влечёт за собой много последствий, которые необходимо будет преодолеть.
Настоящим спасением из данной ситуации стал ШИМ-регулятор, который работает на мощных полевых силовых транзисторах. Они могут коммутировать большие токи (которые достигают 160 Ампер) при напряжении всего в 12-15В на затворе. Следует отметить, что сопротивление у открытого транзистора довольное мало, и благодаря этому можно заметно снизить уровень рассеиваемой мощности. Чтобы создать свой собственный ШИМ-регулятор, понадобится схема управления, которая сможет обеспечить разность напряжения между истоком и затвором в границах 12-15В. Если этого не получится достичь, то сопротивление канала будет сильно увеличиваться и значительно возрастёт рассеиваемая мощность. А это, в свою очередь, может привести к тому, что транзистор перегреется и выйдет из строя.
Выпускается целый ряд микросхем для ШИМ-регуляторов, которые смогут выдержать повышение входного напряжения до уровня 25-30В, при том, что питание будет всего 7-14В. Это позволит включать выходной транзистор в схеме вместе с общим стоком. Это, в свою очередь, необходимо для подключения нагрузки с общим минусом. В качестве примеров можно привести такие образцы: L9610, L9611, U6080B ... U6084B. Большинство нагрузок не потребляет ток больше 10 ампер, поэтому они не могут вызвать просадку напряжения. И как результат - использовать можно и простые схемы без доработки в виде дополнительного узла, который будет повышать напряжение. И именно такие образцы ШИМ-регуляторов и будут рассмотрены в статье. Они могут быть построены на основе несимметрического или ждущего мультивибратора. Стоит поговорить про ШИМ-регулятор оборотов двигателя. Об этом далее.
Схема №1

Эта схема ШИМ-регулятора собиралась на инверторах КМОП-микросхемы. Она является генератором прямоугольных импульсов, который действует на 2-х логических элементах. Благодаря диодам здесь отдельно изменяется постоянная времени разряда и заряда частотозадающего конденсатора. Это позволяет менять скважность, которую имеют выходные импульсы, и как результат - значение эффективного напряжения, которое есть на нагрузке. В данной схеме возможно использование любых инвертирующих КМОП-элементов, а также ИЛИ-НЕ и И. В качестве примеров подойдут К176ПУ2, К561ЛН1, К561ЛА7, К561ЛЕ5. Можно использовать и другие виды, но перед этим придётся хорошо подумать о том, как правильно сгруппировать их входы, чтобы они могли выполнять возложенный функционал. Преимущества схемы - доступность и простота элементов. Недостатки - сложность (практически невозможность) доработки и несовершенство относительно изменения диапазона выходного напряжения.
Схема №2

Обладает лучшими характеристиками, нежели первый образец, но сложнее в выполнении. Может регулировать эффективное напряжение на нагрузке в диапазоне 0-12В, до которого изменяется с начального значения 8-12В. Максимальный ток зависит от типа полевого транзистора и может достигать значительных значений. Учитывая, что выходное напряжение является пропорциональным входному управляющему, данную схему можно использовать как часть системы регулирования (для поддержки уровня температуры).
Причины распространения
Чем привлекает автолюбителей ШИМ-регулятор? Следует отметить стремление к увеличению КПД, когда проводится построение вторичных для электронной аппаратуры. Благодаря данному свойству можно данную технологию найти также при изготовлении компьютерных мониторов, дисплеев в телефонах, ноутбуках, планшетах и подобной техники, а не только в автомобилях. Также следует отметить значительную дешевизну, которой отличается данная технология при своём использовании. Также, если решите не покупать, а собирать ШИМ-регулятор собственноручно, то можно сэкономить деньги при усовершенствовании своего собственного автомобиля.
Заключение

Что ж, вы теперь знаете, что собой представляет ШИМ-регулятор мощности, как он работает, и даже можете сами собрать подобные устройства. Поэтому, если есть желание поэкспериментировать с возможностями своего автомобиля, можно сказать по этому поводу только одно - делайте. Причем можете не просто воспользоваться представленными здесь схемами, но и существенно доработать их при наличии соответствующих знаний и опыта. Но даже если всё не получится с первого раза, то вы сможете получить очень ценную вещь - опыт. Кто знает, где он может в следующий раз пригодиться и насколько важным будет его наличие.